Home⇨The tsukamoto13⁰ oriented matroid
Tsukamoto, [2013] shows that Suvorov's oriented matroid is not
the smallest possible one with disconnected realization space.
His examples use 13 elements instead of Suvorov's and
Richter-Gerbert's 14.
The basic approach is the same as Richter-Gerbert,
take a 3 by n matrix, define a chirotope function using the 3 by 3 determinants,
carefully select one triple for which that chirotope is zero, where the oriented matroid can be
locally perturbed, and define two new oriented matroids by perturbing in either direction.
Here is Tsukamoto's matrix, which is evaluated with
s=½, t=½ and u=⅓.
| A |
B |
C |
D |
E |
F |
G |
H |
I |
J |
K |
L |
M |
| 1 | 0 | 0 | 1 | s | s | 0 | 1 | 1 | st | s+t-u-st+su | s+t-st-s2u | s(t-u+su) |
| 0 | 1 | 0 | 1 | 0 | 1 | t | t | u | t | t-u + su | t | t-u+su |
| 0 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | 1-su | 1-u+su | 1-su | 1-u+su |
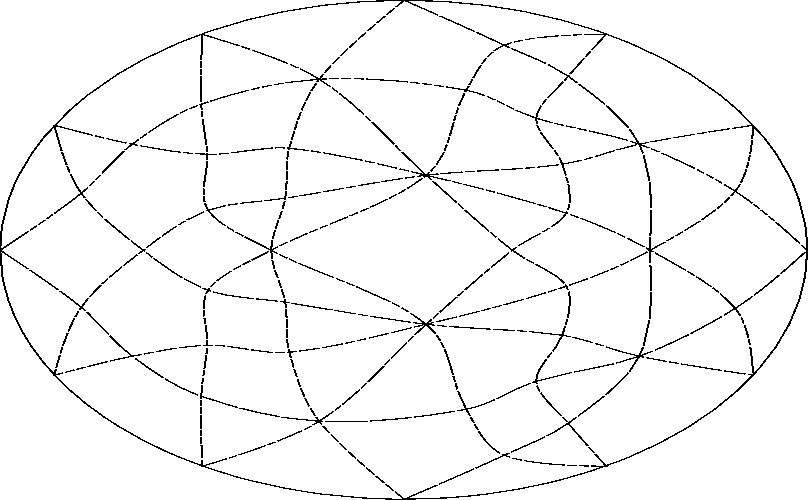
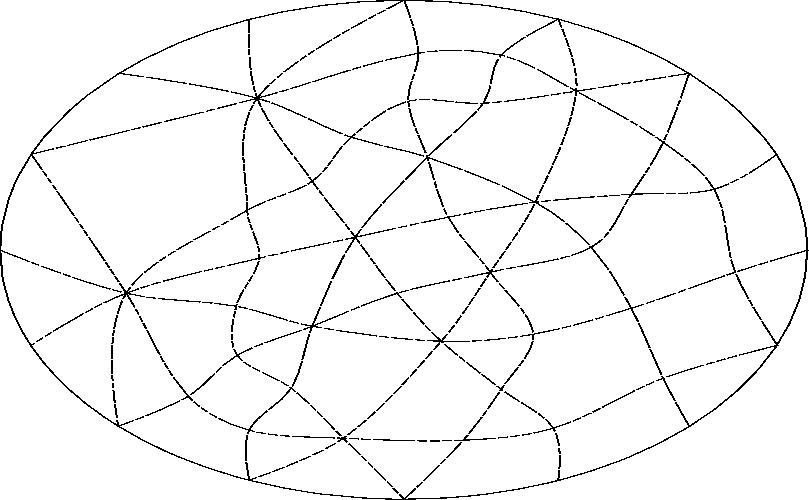
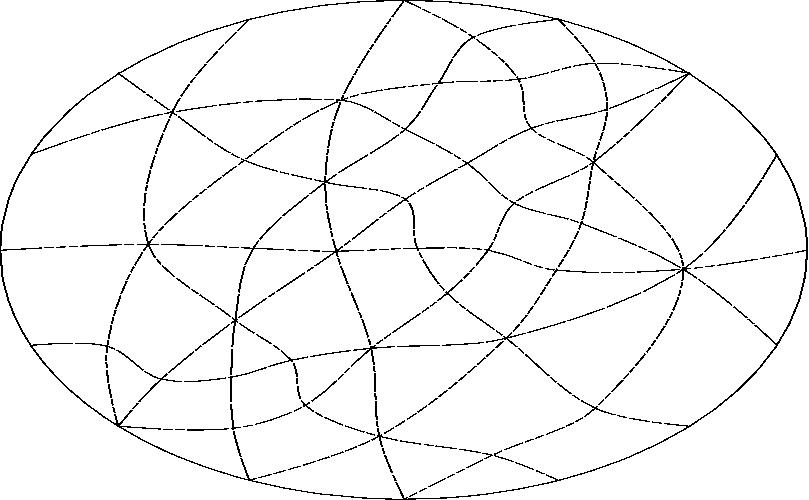
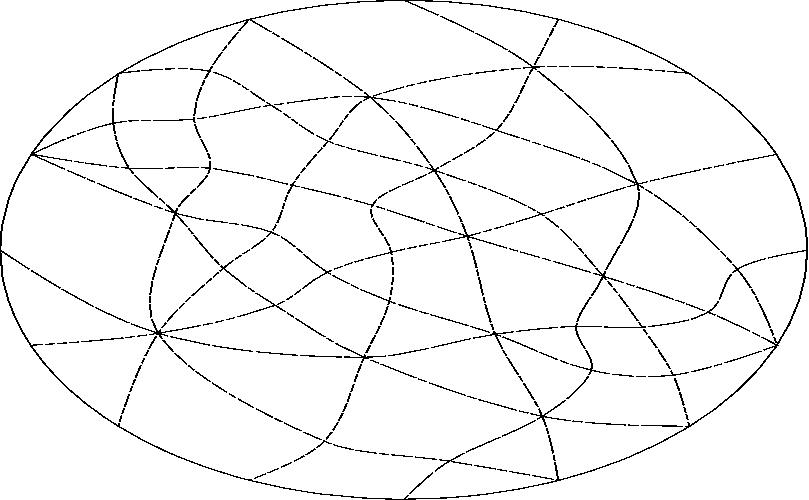
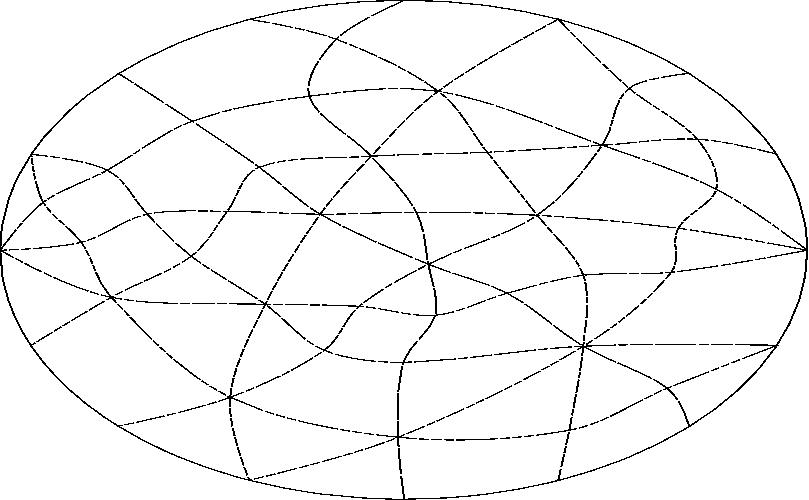
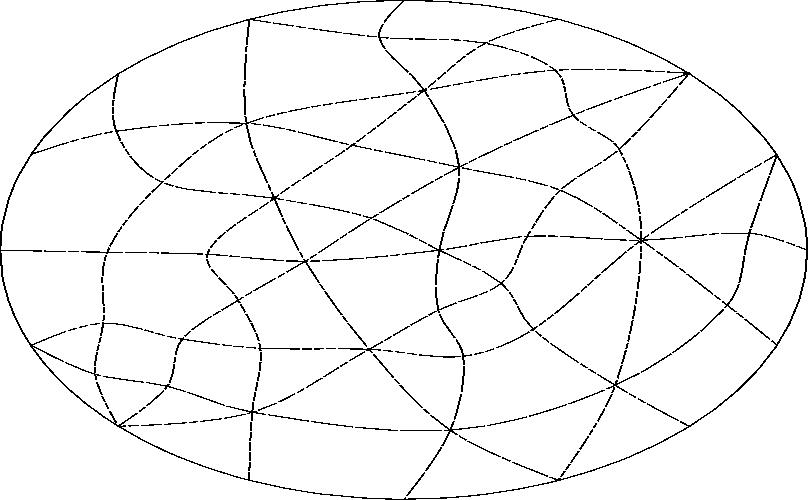
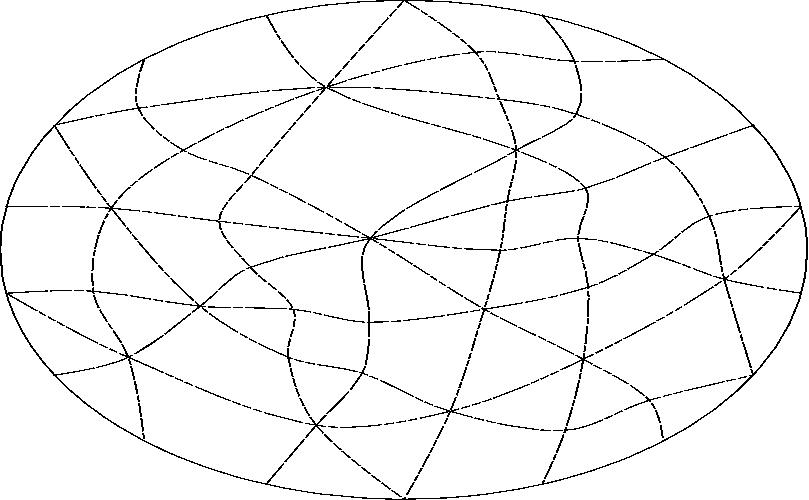
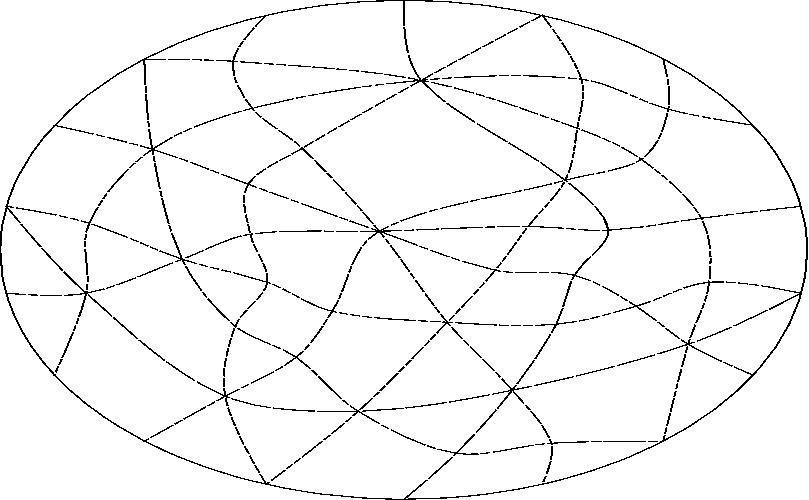
This oriented matroid is defined by the above matrix:
two equivalent methods are to define the chirotope using the 3 by 3 subdeterminants,
or to define the vectors as the signed column dependencies.